A self-driving car is a computer-controlled vehicle that drives itself. Also referred to as an autonomous vehicle, driverless car, or robotic car (robo-car), a self-driving car analyzes its environment to safely move and react without human input.
In this article, you’ll learn:
-
- 6 levels of autonomous cars
- History of autonomous vehicles
- How do self-driving cars work?
- Security vulnerabilities, risks & concerns of connected and autonomous vehicles
- What company makes the security technology for ADAS?
- Moving the flood of data in autonomous vehicles
- What company makes automotive MIPI solutions?
- Additional resources
6 levels of autonomous cars
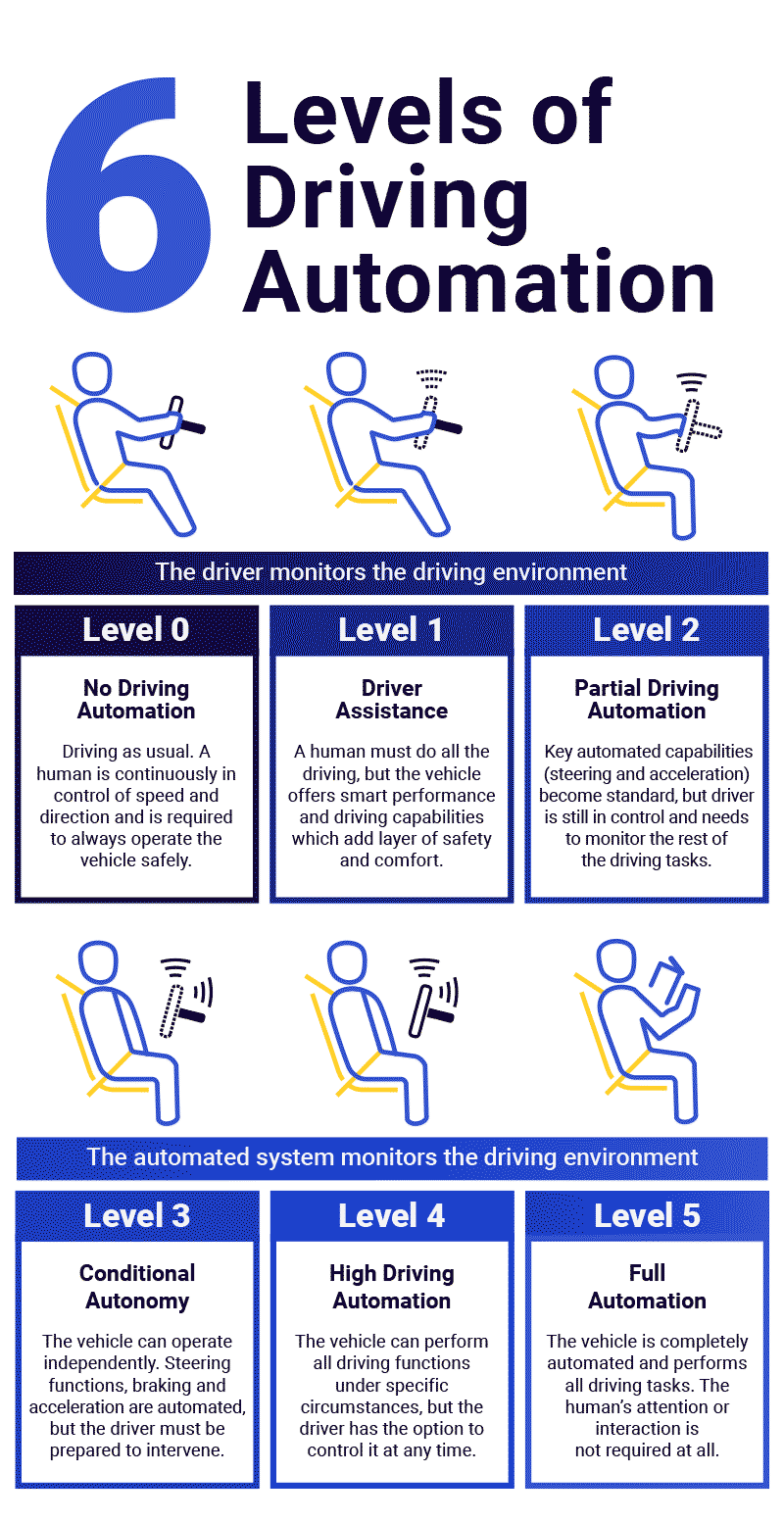
In 2014, the engineering group SAE International created six levels of driving automation which have since been adopted by the U.S. Department of Transportation. These include:
- Level 0: No automation
- Level 1: Driver assistance
- Level 2: Partial driving automation
- Level 3: Conditional driving automation
- Level 4: High driving automation
- Level 5: Full driving automation
Automakers have already announced Level 3 autonomous driving cars—and are working to develop and deploy Level 4 self-driving trucks as well as commercial robotaxis. According to Accenture, vehicles with full-on self-driving capabilities could start hitting highways as early as 2030.
Keep on reading: SAE level of automation in cars simply explained.
History of autonomous vehicles
The concept of a self-driving car was first introduced by General Motors (GM) at a 1939 World Fair exhibit. In 1953, RCA Labs and GM built a miniature car that was guided and controlled by patterned wires. A full-size system was subsequently demonstrated in Nebraska using specially designed road lights and buried detector circuits.
By the 1980s, self-driving technology had improved considerably, with the Defense Advanced Research Projects Agency (DARPA) leveraging lidar, computer vision, and autonomous robotic controls to direct a vehicle at speeds of up to 19 miles per hour (31 km/h). DARPA partner HRL Laboratories later demonstrated the first off-road map and sensor-based autonomous navigation in a test vehicle that traveled over 2,000 feet (610 m) at 1.9 miles per hour (3.1 km/h) through challenging terrain.
The 1990s saw Carnegie Mellon University pioneer and refine neural networks to steer and control autonomous vehicles under the auspices of the Navlab project, with a test vehicle completing a 3,100 miles (5,000 km) cross-country journey. Additional self-driving advances were made by major automakers and technology companies like Waymo, Uber, and Tesla throughout the 2000s, 2010s, and early 2020s. In 2014, Tesla Motors announced its first version of Autopilot, which later expanded to support autonomous steering, braking, speed adjustment, and parking capabilities. In October 2020, Tesla rolled out the first version of its full self-driving beta (FSD Beta) software and continues to release updates at a steady cadence.
How do self-driving cars work?
Most advanced driver-assistance systems (ADAS) powering vehicles with various levels of autonomy leverage a combination of specialized cameras and sensors to create an internal map of the vehicle’s surroundings. These sensors include:
- Lidar—Pulses thousands of beams of infrared laser light at objects to calculate distances and avoid objects.
- Radar—Uses radio waves to measure angles, ranges, and velocities of objects in most environmental conditions.
- Sonar—Identifies large objects made of solid materials, such as metal and ceramics, at short distances.
- Inertial navigation system—Helps self-driving cars stabilize themselves.
- GPS—Geolocates with numerical coordinates, including latitude and longitude, while navigating by combining real-time GPS coordinates with other digital map data applications.
Self-driving cars analyze the data generated by these sensors to plot navigational paths and react in real-time by stopping, speeding up, slowing down, and avoiding objects. They reduce the risk of accidents and collisions by implementing safeguards, alerting drivers, and taking full control of a vehicle if necessary. Moreover, self-driving cars automatically detect and react to other vehicles, bicyclists, pedestrians, construction zones, potholes, traffic accidents, and traffic jams. Perhaps most importantly, self-driving cars enforce safety standards that may be deliberately or accidentally ignored by human drivers.
Security vulnerabilities, risks & concerns of connected and autonomous vehicles
Semiconductors in connected vehicles and self-driving cars power extremely complex electronic systems. In the past, vehicle electronic systems implemented flat architectures with isolated functions controlling various components of the powertrain and vehicle dynamics. These electronic systems communicated primarily through legacy bus interconnect protocols, such as controller area network (CAN) and media-oriented systems transport (MOST) technologies.
To support the realization of Level 4 and Level 5 (L4/L5) autonomous driving, a massive architectural shift is underway. The software-defined vehicle, automotive Ethernet, vehicle-to-everything (V2X) connectivity, over-the-air updates (OTAs), and domain controller units are just some of the technologies required to achieve L4/L5 capabilities.
Indeed, new electronic systems support powertrain and vehicle dynamics, ADAS, autonomous driving, connectivity, and infotainment. At the heart of these electronic systems is a complex, multi-island IC containing multi-core processing, dedicated artificial intelligence and machine learning (AI/ML) engines, mixed-signal processing, and more.
Whether it’s a complex system on chip or a mixed-signal IC sitting at a sensor edge, security and safety are essential. Indeed, the advancements in vehicle electronic systems have resulted in a large attack surface for adversaries to exploit. In commercial or industrial applications, security is focused on providing trust, protecting assets, and protecting identities. In automotive, these focus areas remain, but another dimension is added.
This is because security vulnerabilities have the potential to directly impact safety measures implemented in a vehicle. For example, the lack of a robust safety architecture can cause a design to malfunction, with failures creating new security penetration points in the ICs, systems, and throughout the entire vehicle. On the flip side, an incomplete security architecture may be exploited by adversaries to circumvent or disable safety features, making the vehicle vulnerable to run-time failures.
What company makes the security technology for ADAS?
Rambus automotive hardware security modules (HSMs) are designed to protect self-driving cars and connected vehicles. These HSMs provide secure boot, secure firmware (OTA) upgrades, secure debug, and work with other security functions such as MACsec, IPsec, and TLS embedded protocol engines that protect network traffic in cars. To operate properly, ECUs must run the manufacturer intended firmware—without tampering. A root of trust ensures firmware is valid and can be securely updated when needed. Rambus offers embedded HSM (root of trust) variants for both ASIL-B (RT-640) and ASIL-D (RT-645) that are specifically designed for the functional safety requirements of ISO 26262, an international automotive electronics system standard.
The Rambus RT-640 Embedded HSM recently received Automotive Safety Integrity Level B (ASIL-B) ISO 26262 certification. Certified ASIL-B compliance is a critical requirement for automotive manufacturers and their suppliers to ensure vehicle systems meet necessary safety levels.
Integrated into an automotive SoC, the ASIL B certified RT-640 silicon IP design provides powerful cryptographic functions, state-of-the-art safety mechanisms, and anti-tamper technologies to protect critical automotive electronics and data.
Moving the flood of data in autonomous vehicles
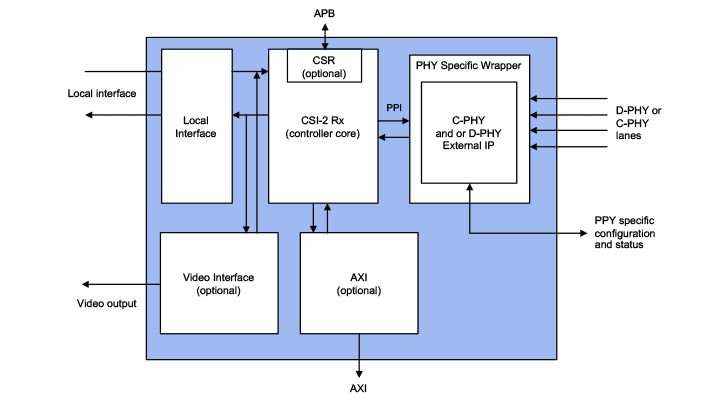
All the data from the array of cameras and sensors employed in autonomous vehicles takes tremendous bandwidth. The MIPI Camera Serial Interface 2 (MIPI CSI-2®) v3.0 is increasingly the workhorse solution for transporting this vast volume of data. CSI-2 v3.0 offers capabilities including Unified Serial Link (USL) for encapsulating connections between a sensor module and application processor.
Regarding the choice of network connectivity in electronic systems, weight is not normally a first-order consideration, but it absolutely is when it comes to vehicles. A major networking hurdle introduced by the proliferation of sensors is the weight of cabling. In many vehicles, wiring is one of the top four heaviest subsystems. This issue is compounded as more cars go electric adding in the weight of the battery. A Tesla® battery pack, for instance, weighs about 900 pounds which nets out much heavier than an engine and full tank of gas.
What’s more, it’s often the electric vehicle makers that are leading the charge for autonomous driving. They need more sensors and better networking while simultaneously reducing weight to compensate for the battery. The weight benefit of MIPI, and networking technology such as automotive Ethernet, is that it can provide low-latency, high-bandwidth connections with fewer wires than legacy networking solutions. This enables the continued profusion of sensors for ADAS while keeping the weight of cabling low.
On the human interface side, whether for instrumentation, navigation or entertainment, modern vehicles include a large and growing number of displays. Here too MIPI plays a leading role with DSI-2® solutions providing the high-bandwidth, low latency connectivity needed for high-resolution video and images.
What company makes automotive MIPI solutions?
Rambus has been a provider of MIPI IP solutions since 2010 and offers 32 and 64-bit digital controllers for CSI-2 and MIPI DSI-2 connectivity. Partnering with top-tier MIPI C/D-PHY suppliers, such as Mixel and Samsung, Rambus solutions have enabled over 250 ASIC and FPGA MIPI designs. An increasing number of these designs are for ADAS applications with leaders in the automotive market which Rambus supports with a full suite of customization and integration services, applicable safety manual, FMEDA and DFMEA.
The Rambus MIPI CSI-2 Transmitter (TX) Controller and the associated development processes have been certified to meet the ISO 26262 functional safety requirements. As with the embedded HSM solutions discussed earlier, using ISO 26262 certified IP enables automotive chip makers to accelerate the process of creating and safety certifying their SoCs.
Additional Resources:
– Other blogs around automotive & security:
- Autonomous Vehicles: Memory Requirements & Deep Neural Net Limitations
- Automotive Security: Protecting vehicle electronic systems
- NextChip Win Signals Growing Momentum for Rambus Automotive Security IP
- Designing automotive memory
- Addressing automotive security challenges with a hardware root of trust
- The challenge of securing connected vehicles
- How not to get pwned @ automotive cyber-security
- No quick fix for automotive insecurity
- Securing connected vehicles with Rambus CryptoManager
- Autonomous vehicles shift security risks into overdrive
– White Paper: Navigating the Intersection of Safety and Security
– Market page: Automotive Solutions
– Products for Automotive Applications:
- RT-640 Embedded HSM ISO 26262 ASIL-B
- RT-645 Embedded HSM ISO 26262 ASIL-D
- MACsec Protocol Engines
- IPsec Protocol Engines
- MIPI CSI-2 Controller
- MIPI DSI-2 Controller
Leave a Reply